At Orlando HamCation, I ran across the booth for Spec5. They sell some very cool Meshtastic devices. I briefly experimented with Meshtastic a couple of years ago, but it had not really taken off in my area, so I didn’t get very far. More recently, several people in the area have installed nodes, so it is more interesting and useful now. In fact, there is a group working to install nodes to connect communities across the region. This will make Meshtastic more useful as an option for grid-down communication.
One of the devices I bought at HamCation is the Spec5 Ranger. It is a cool Meshtastic device with a keyboard, so messages can be sent directly through the device. You do need a phone, tablet or computer to configure it initially, but once it is set up it can be used alone.
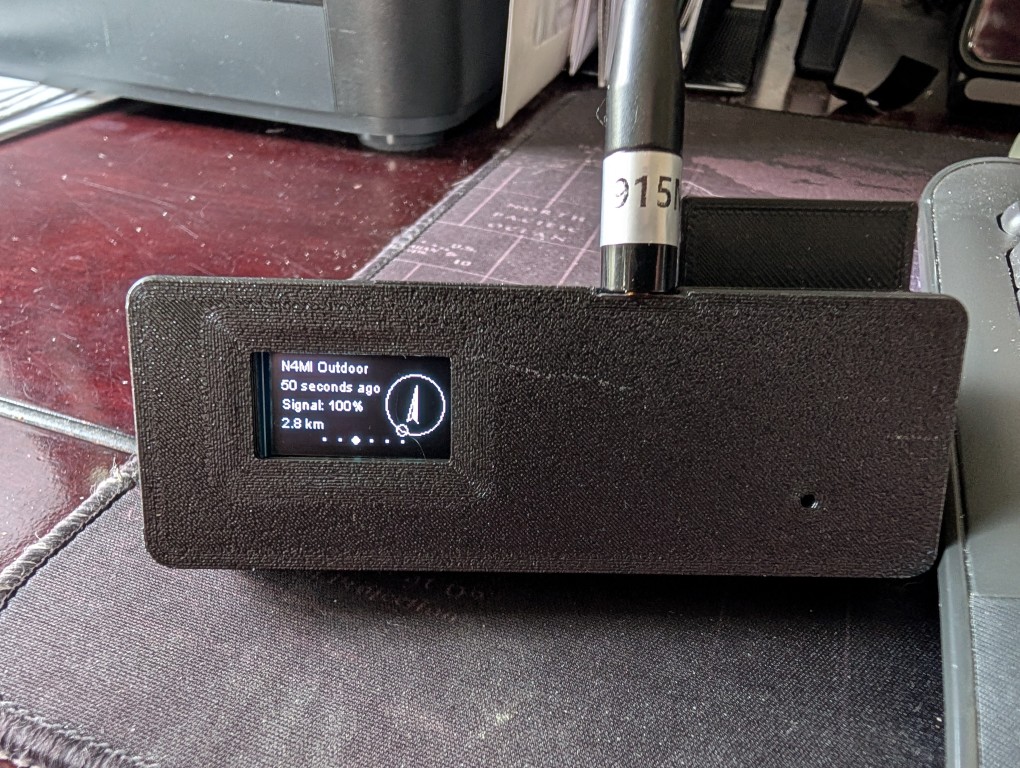
I had this homebuilt Meshtastic device from my earlier experimentation, so I flashed it with the most recent firmware and configured it with my phone. This one does require a bluetooth connection to a phone or tablet to send messages. It is a LILYGO T-Beam ESP32 LoRa board with OLED display and 18650 battery.
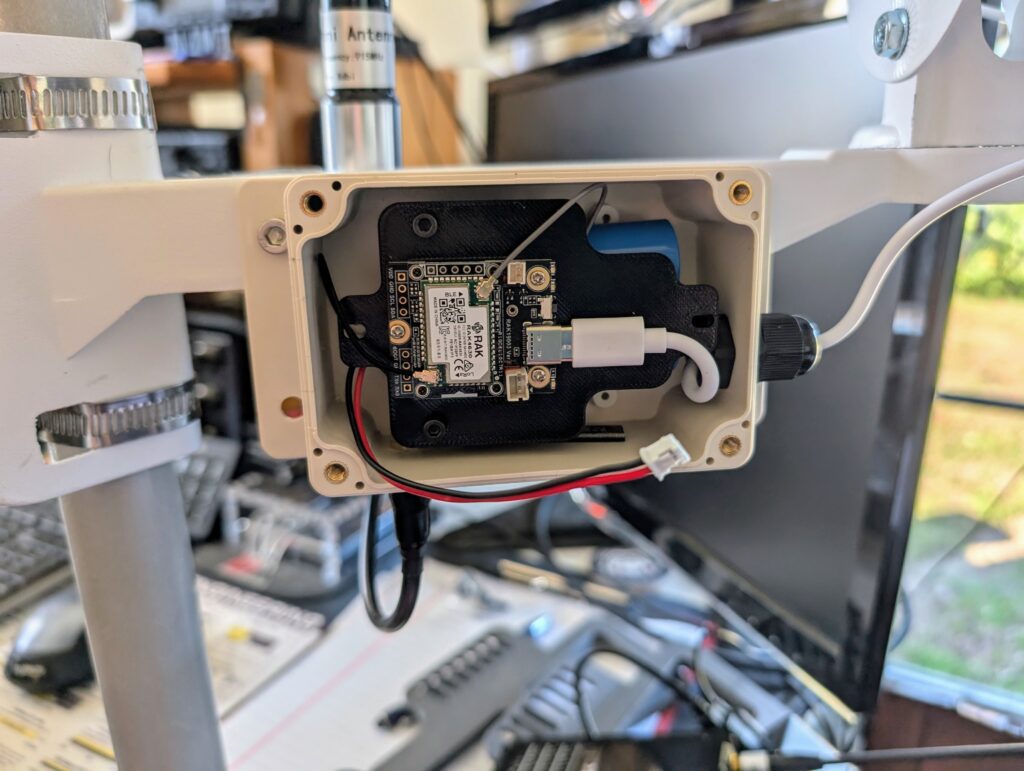
I knew I would have limited range with the handheld devices and small 915 MHz antennas, so I wanted something that could extend the range. I ended up getting another Spec5 device, the Spec5 Relay to set up outside. It was very easy to assemble, and also easy to configure using the Meshtastic application on my phone. I have it mounted on a 15 foot mast at the edge of my property. It transmits and receives over a greater distance due to the better antenna, and placement outside. It has a solar panel to keep the 18650 batteries charged. I will be putting it on a 25 foot mast soon to extend the range even further. While the Relay can be set up in a repeater mode, I have it set up in client mode, which is the best setting for this location.
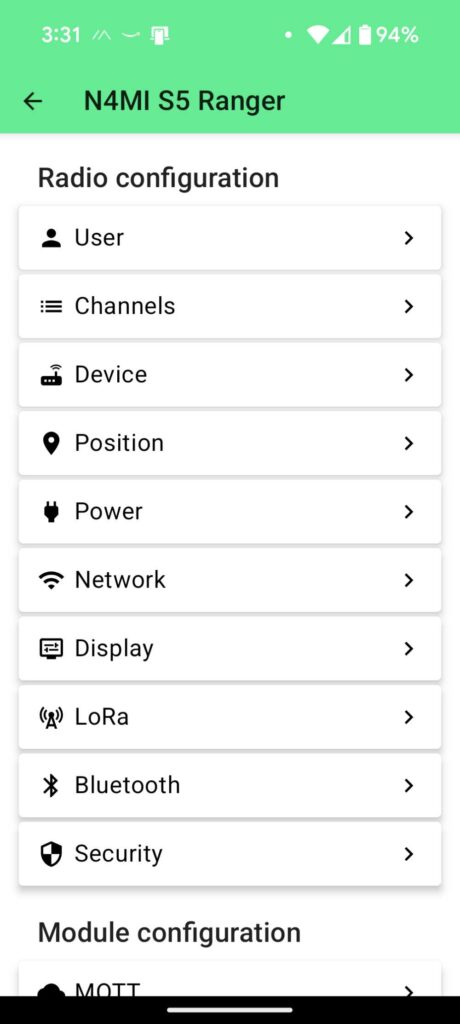
This is a screenshot from the Meshtastic Android app on my Google Pixel phone It is connected to my S5 Ranger by bluetooth. This is a view of all of the different configuration settings.
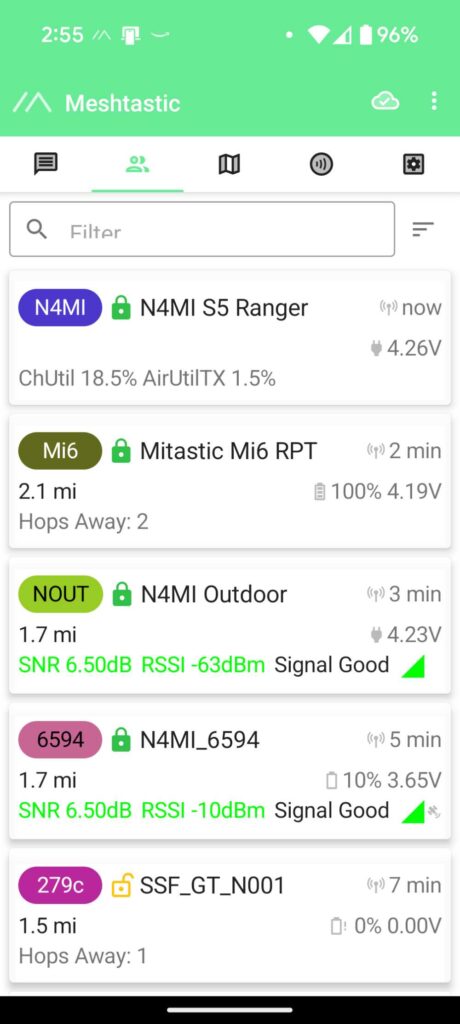
This is a view of the most recently connected nodes that my device can see. You can see my other two device on there (they are very close), but through the S5 Relay it is connected to several other nodes that are further away.
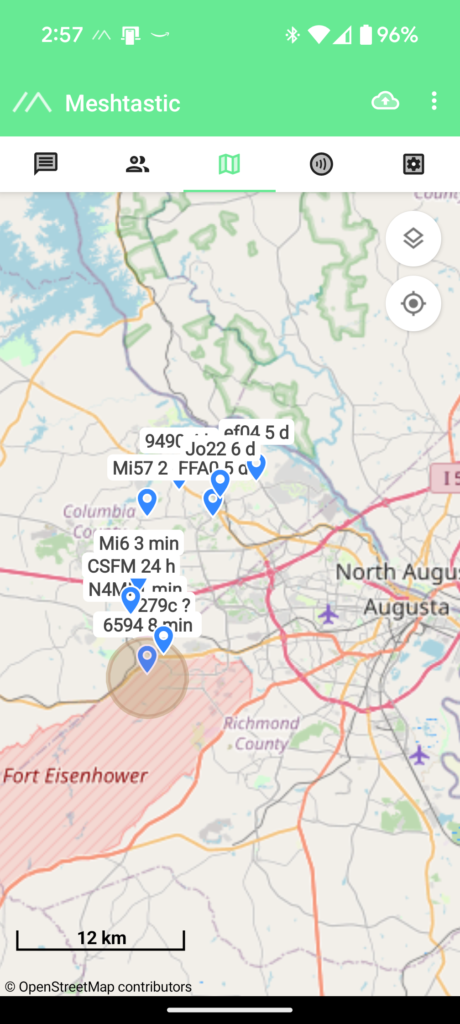
This is the map view from the Meshtastic application, showing several nodes that my S5 has seen from my house and while traveling around the area.
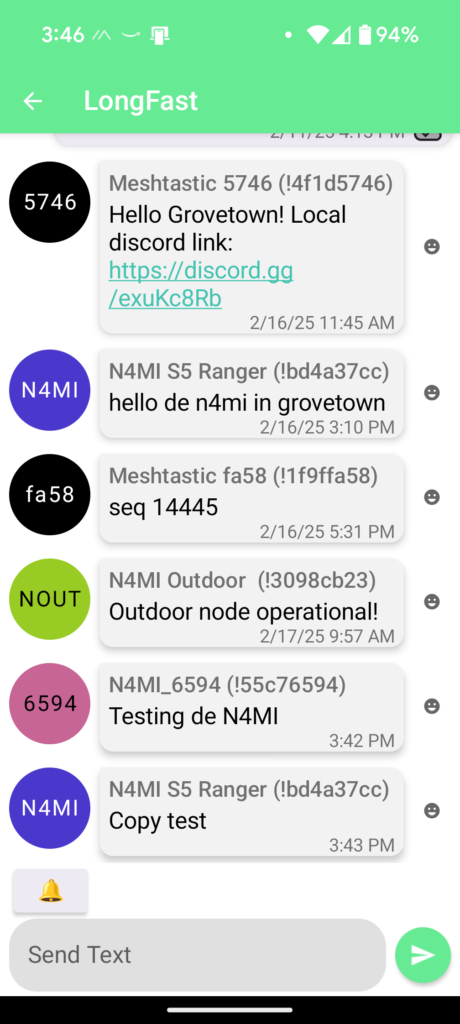
This view shows messages that have been received by and sent from my nodes.
I have one of my nodes connected to an old iPhone. The iPhone Meshtastic app seems to be functionally the same as the Android app, but it looks different.
So, what’s next. I will continue to learn more about the functions and utility of Meshtastic, and will try to help local users extend the mesh to reach more communities.
It has been a year since I posted a new item! Time to get back to it! My last post was about a project for my IC-705 using an M5Stack microcontroller. I became interested in learning about other ham radio related projects using microcontrollers.
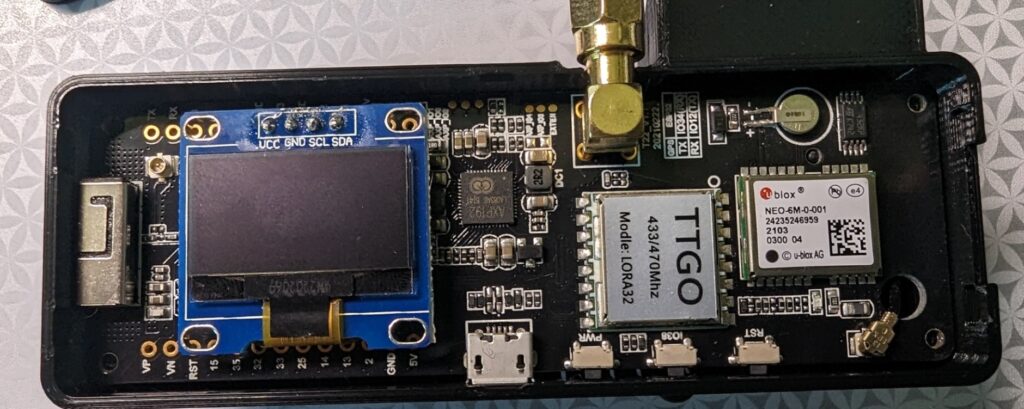
Searching online, I found two related projects to build an APRS iGate and a tracker. Both of these projects use inexpensive LoRa32 microcontroller boards. I chose TTGO T-Beam v1.1 boards that operate on 433 MHz. Make sure you buy the 433 MHz version of the board for the APRS projects. The board includes a small OLED screen, and has onboard WiFi, GPS and SMA connector for the antenna. You will probably have to solder the OLED screen to the board, but there are only four pins to solder.
On the back of the board, there is a battery holder for an 18650 3.7 V lithium ion battery to power the board. The board can also be powered through the microUSB port, which also recharges the battery. There are other similar LoRa32 boards that you can use for these projects, and they are readily available on Amazon, eBay, and other online retailers.
Front and back of TTGO T-Beam v1.1 ESP32 433MHz LoRa32 board
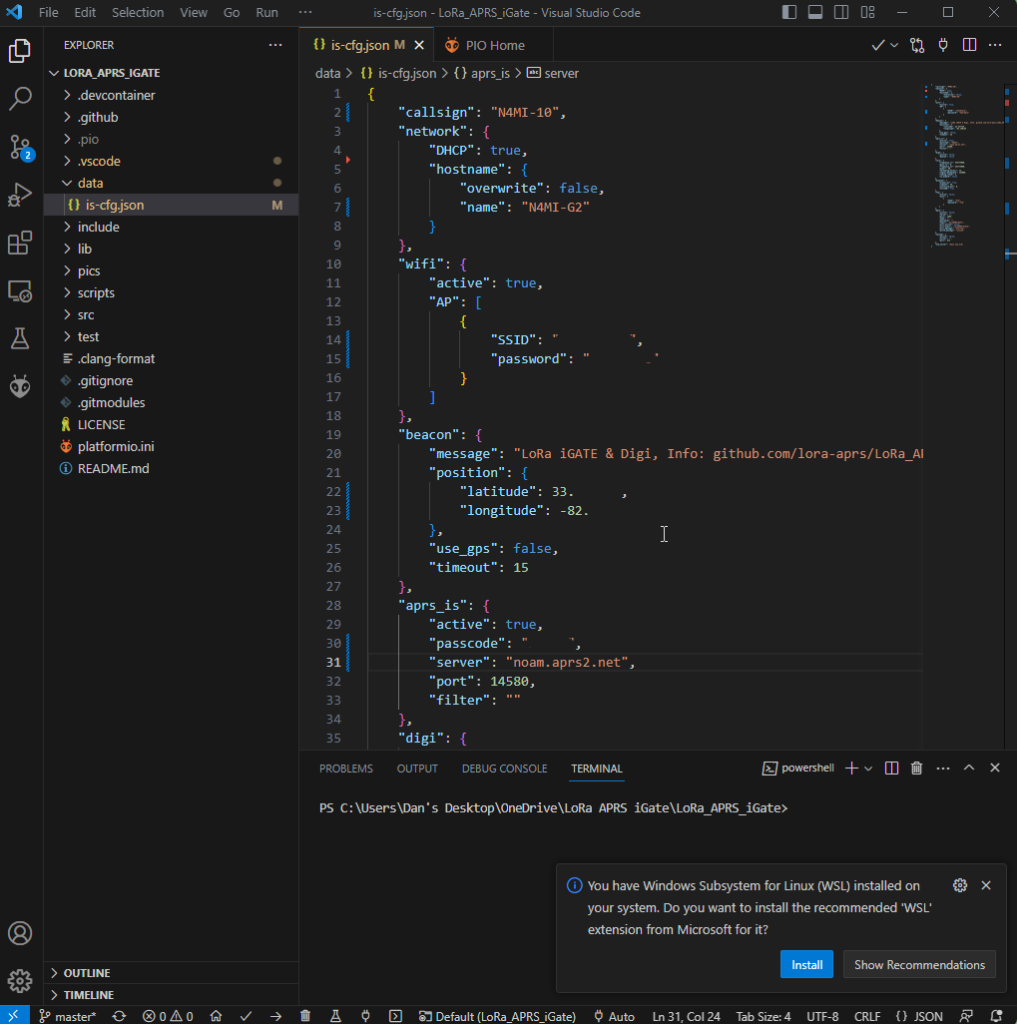
Programming the board is fairly easy. The iGate and tracker project pages on GitHub include links to quick start guides. The quick start guides are in German and French, but you can right-click in Chrome and choose “Translate to English”. Even better, there is an excellent video by Tech Minds on YouTube that will take you step-by-step through the process of configuring and programming the iGate and tracker modules using Visual Studio Code with the PlatformIO plugin. This process will load the firmware onto the module, as well as a json configuration file that includes your callsign, wifi info (for the iGate), etc. I highly recommend viewing the Tech Minds video before you start these projects!
Lora APRS iGate json configuration file in Visual Studio Code
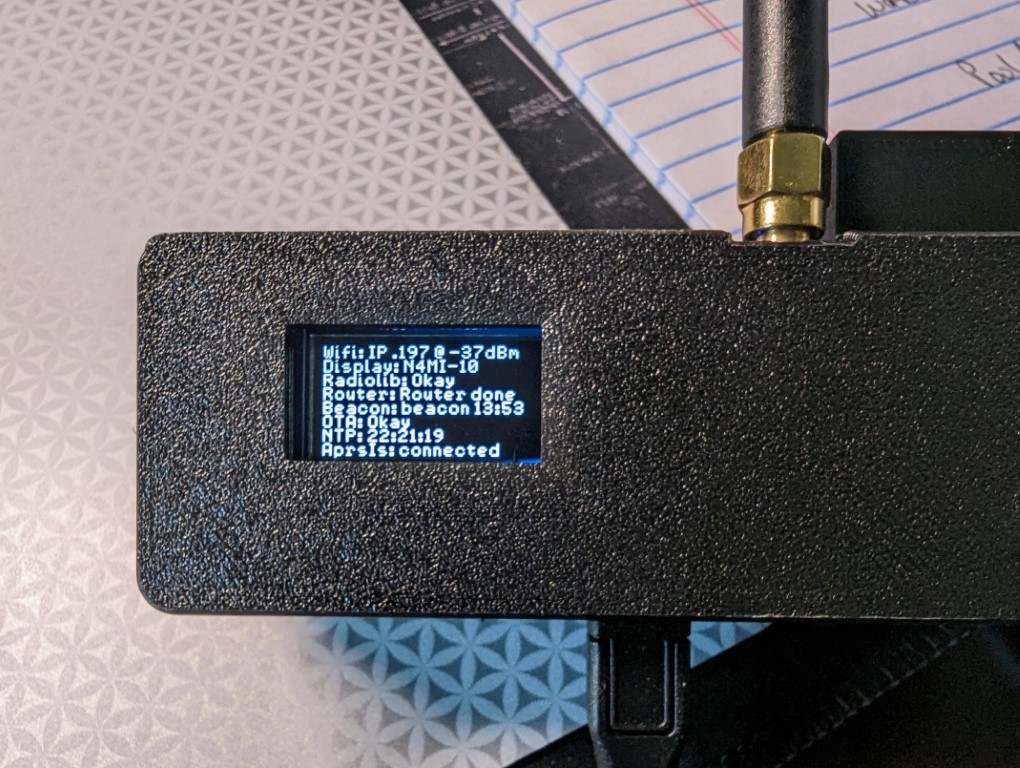
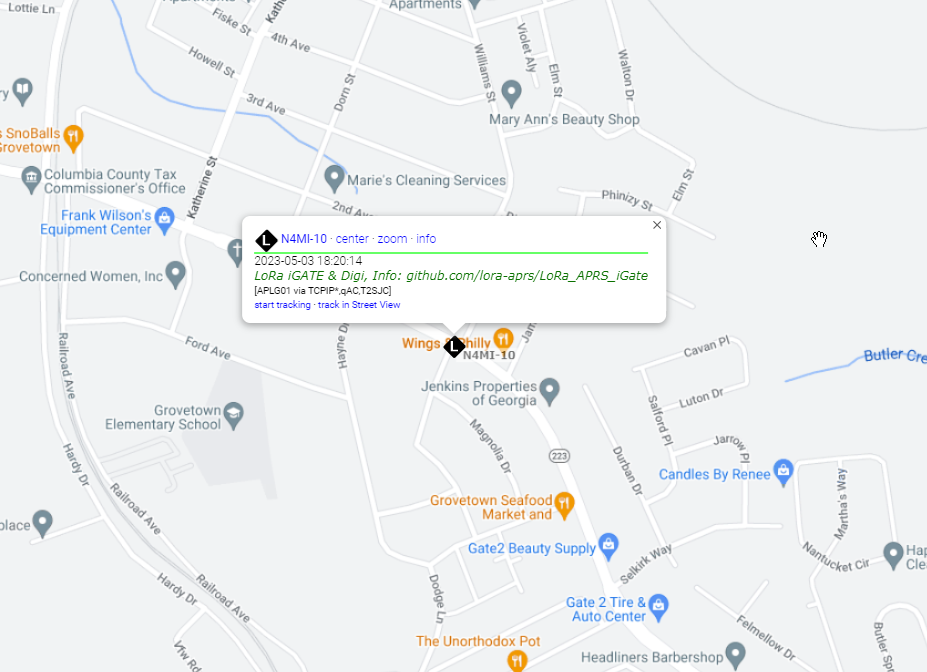
After programming the iGate and tracker, I was ready to test! I missed a step in my initial configuration of the iGate, so it did not connect to my home wifi on the first attempt. Once that was fixed, it connected to the internate and I was able to see the LoRa iGate symbol for my ssid N4MI-10 appear on the aprs.fi live APRS map. The iGate is operating on 433.775 MHz.
OLED screen showing LoRa APRS iGate configurationN4MI-10 LoRa APRS iGate, operating on 433.775 MHz, displayed on aprs.fi
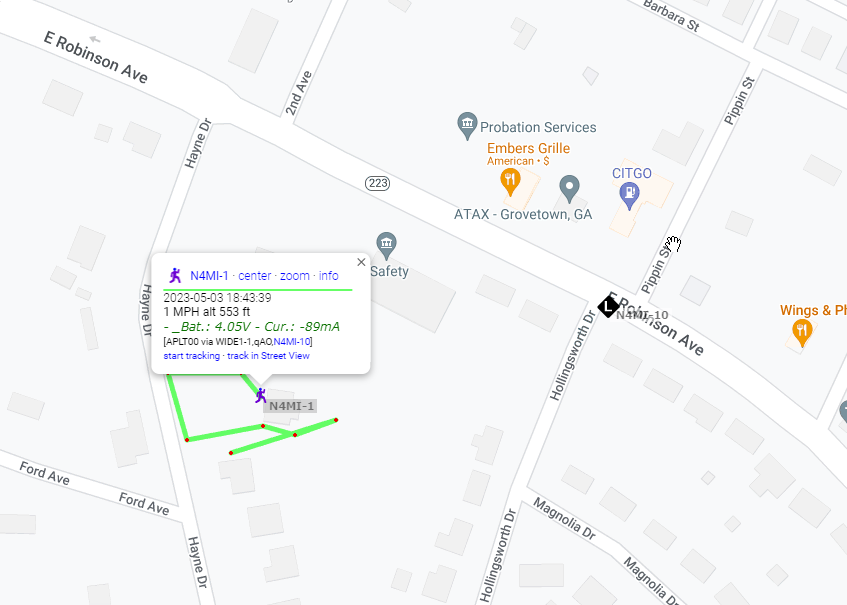
Once the iGate was operational, it was time to test the tracker. I chose N4MI-1 as the ssid for testing the tracker. I have some other APRS capable radios, so I will have to come up with a plan for assigning a ssid for each of them. The tracker powered up and initialized. Once it acquired enough satellites for a fix, I saw it transmit the first beacon, which was immediately picked up by the iGate. Awesome!
You can configure the tracker for smart beaconing in the json configuration file. You can also manually transmit a beacon using the middle button on the LoRa module.
OLED screen on LoRa 433 MHz APRS tracker
I took the tracker out for a short walk, and transmitted a beacon from several locations, all of which were received by the iGate and displayed on aprs.fi.
Positions from N4MI-1 LoRa 433 MHz APRS tracker displayed on aprs.fi
The transmitter in the LoRa board is very low power, about 200 mW, so the range with the small SMA antenna is limited. The range can be extended by using a better antenna at a higher elevation. Additionally, a small RF amplifier could be used to increase the power.
This was a very fun and relatively easy project. I am planning to attach a 70cm antenna at a higher elevation to the iGate in case other hams in this area would like to build and use LoRa 433 MHz APRS trackers.
The Icom IC-705 is an amazing QRP transceiver with lots of advanced features. Those features include built-in Bluetooth and wireless LAN, creating opportunity for display and control the IC-705 remotely. Some excellent free software recently became available to take advantage of the Bluetooth capability for a remote display using an inexpensive IoT development board. Also, an incredible iPad app was recently released that allows full remote display and control of the IC-705 via WiFi or LAN.
Remote S Meter and MultiMeter Projects with M5Stack
There are two very easy projects using code available on GitHub and an inexpensive M5Stack Core Development Kit: one to create a remote S Meter and another to create a more advanced and very useful remote MultiMeter.
M5Stack Core Development Kit
The M5Stack is an ESP32 development system for IoT applications. This extremely powerful yet low-cost chip includes Wi-Fi and Bluetooth and has quickly become popular over the past year or so. The M5Stack Core Development Kit is currently available on Amazon for about $50.
The first project I completed using the M5Stack was the IC705SMeter, created by Armel, F4HWN. Once the code is installed and the M5Stack is connected by Bluetooth to the IC-705, it has a selectable display of the received signal strength, output power, and SWR. It also displays the current frequency, mode and filter. It was very easy to install the software and connect to the IC-705 by following step by step instructions in a YouTube video by Ham Radio Dude.
Remote S-Meter connected to IC-705 via Bluetooth
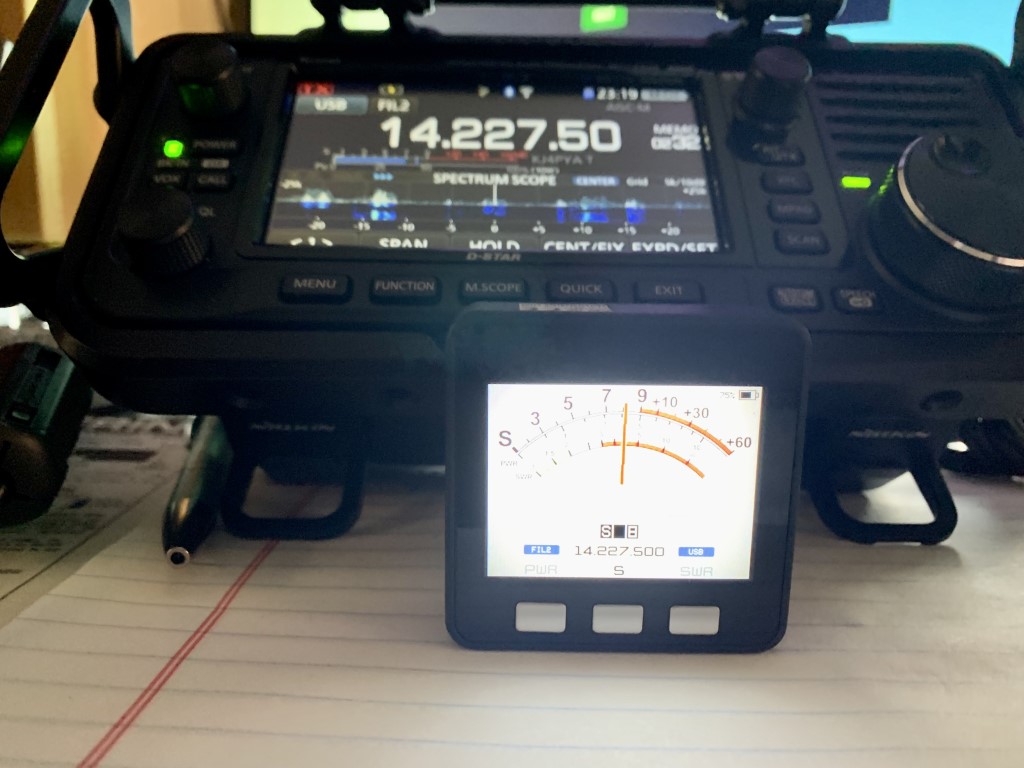
There is also another more advanced remote meter project, also created by Armel, called the ICMultiMeter. This project allows you to display the equivalent of the meter screen of the IC-705 on the M5Stack screen, which allows you to dedicate the IC-705’s screen to the waterfall while seeing all the signal measurements simultaneously on the M5Stack screen. The installation process is very similar to the S Meter project. A YouTube video by Tech Minds has easy-to-follow instructions to build and install the remote MultiMeter.
IC MultiMeter connected to the IC-705 via Bluetooth
SDR Control Software for iPad
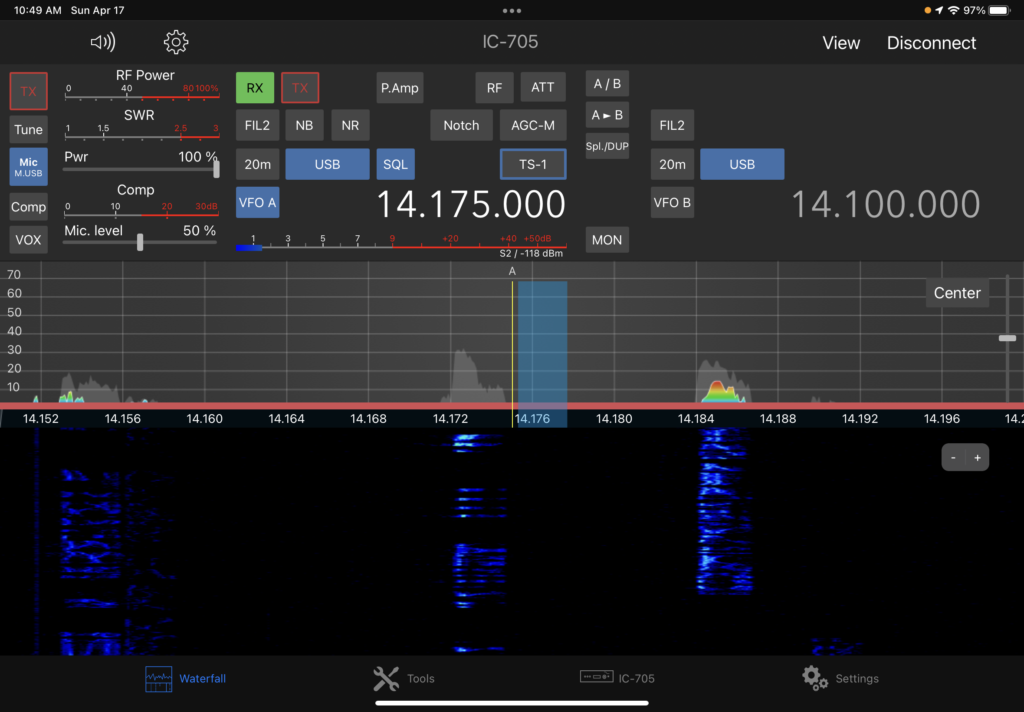
Having a remote meter is wonderful, but what if you’d like to have a full remote display and control of the IC-705? An application recently released for iPad will do just that. SDR-Control for Icom, available on the App Store, allows remote operation of the IC-705 without additional hardware or software. The app costs $50, but has tons of features, to include an integrated logbook, CW keyer and FT8/FT4 tool. An important caveat is that the IC-705 and iPad must be connected to the same WiFi network. The app will also control IC-7610 and IC-9700 transceivers connected to the same network via LAN. A YouTube video by Tech Minds provides an excellent overview of the SDR-Control app.
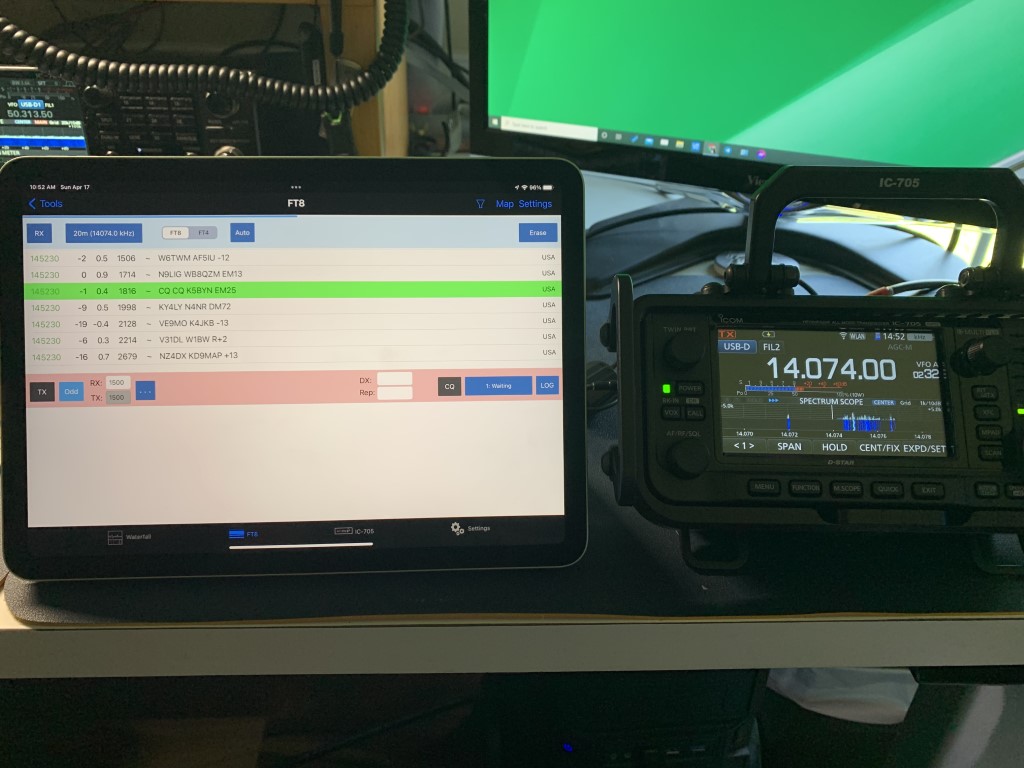
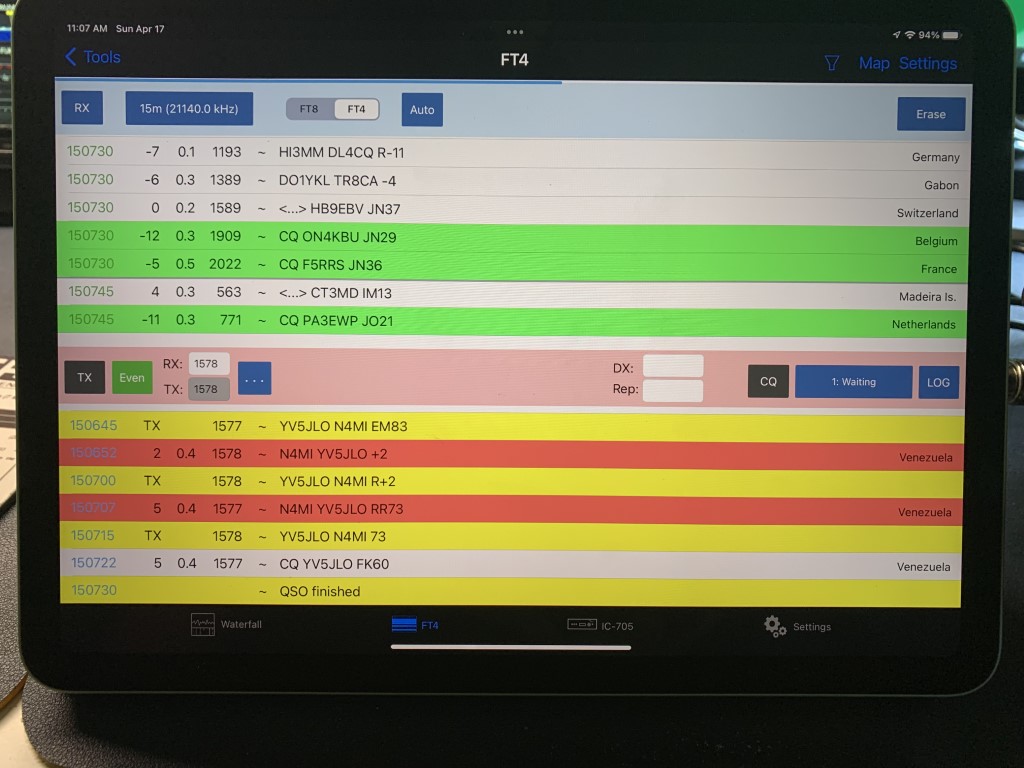
Once installed on the iPad, the app includes an integrated instruction manual explaining all of the functions, to include connecting the app to the IC-705. There is also an online version of the instruction manual. Following the instructions in the manual, I was able to connect to the IC-705 in just a few minutes. I found the app to be very easy to understand and use. When using the integrated FT8/FT4 tool, I did have to consult the manual to adjust the signal levels. Once that was done, it worked very well. The FT8/FT4 tool does not have all of the functionality of WSJT-X (no DXpedition mode), but it works well for casual operating. So far I have only used the app with the IC-705. I don’t yet have my IC-7610 or IC-9700 connected to my home network, but I plan to do that soon so that I can control the transceivers from anywhere in the house.
SDR-Control app connected to the IC-705 via WiFiScreen shot of the SDR-Control appIntegrated FT8/FT4 tool in SDR-ControlI made several FT8 contacts using the integrated FT8/FT4 functions in the appWaterfall screen on the SDR-Control app showing stations sending FT8 signals
I purchased a Veritium HFClock as an impulse buy when I saw it on sale in an email from Gigaparts. I tried to build a HamClock using a Raspberry Pi and 7″ touchscreen, but I could never quite get it to work correctly. The Veritium HFClock is far more expensive, but it has a 9″ touchscreen in an attractive hardwood frame, and was easy to configure right out of the box. It’s definitely an attractive and informative station accessory. I may try again to build a HFClock with a Raspberry Pi someday.
From the time I became licensed, just a little over 5 years ago, I have been using a trusty Diamond X50A antenna mounted on one 5-foot galvanized steel mast on an eave mount, putting the antenna about 4 feet above the roofline. The apex of the roof is approximately 30 feet from the ground. This antenna has served me very well, and with it I could reliably hit most of the repeaters in the area, as well as work stations on simplex up to about 15 miles away. Last year, I added a Cushcraft AR-6 Ringo for 6 meters. When there is a 6M opening, this antenna works OK and I worked quite a few distant stations (see previous posts under the category 6 Meters). However, because of the vertical polarization, I had difficulty working some stations in nearby grids who have horizontally polarized antennas. Also, the Ringo would frequently detune for mysterious reasons. Even though it was mounted on a telescoping mast, it became tiresome to frequently lower and retune it.
When my friend Rusty inquired about renting a 50-foot articulating boom lift to do some antenna work at his house, I thought now might be a good time to upgrade both antennas. I got a Diamond X300A for 2M/70cm, and a M2 HO Loop for 6M. I also got some new 5-foot galvanized masts and 55-feet of new RG-213 coax. My ham friends came over this morning to remove the existing antennas and install the two new antennas. Special thanks to KG4HIR Rusty, KG4HIQ Earl, W4EFS Walter, and KK4ZHT Eric for working all day on this project in the heat and humidity! Eric and Walter did all of the work in the bucket, and Rusty and Earl did the majority of assembly and adjustment of the antennas on the ground.
For this installation, we used three sections of 5-foot galvanized mast (for a total of 15 feet). Approximately 2 feet of the first section sits below the roof apex in the bottom of the eave mount, so about 13 feet of mast is above the rooftop. The X300A, which is a 10-foot antenna, is mounted on top, and the 6M horizontal loop is mounted about 5 feet below that. We used the existing LMR400 coax for 2M/70cm, and the new RG-213 coax for 6M. We tested the SWR and impedance on both antennas on temporary masts at about 15 feet above ground, and both antennas had great readings as assembled – no need for adjustments. I thought we might have to adjust the 6M antenna once it was in place above the roof, but the SWR stayed about the same at 1.2:1.
Eric and Walter preparing to remove the existing Diamond X50A and mast from the eave mount. You can also see the 6M Ringo vertical on the left side of this picture.The X50A and the old mast have been removed. Installing the first new mast section into the eave mount.Both new antennas were assembled and mounted to two mast sections on the ground. Eric and Walter preparing to place the two mast sections with the new antennas into the first mast section.All three masts and the two antennas are in place. Walter and Eric are adjusting and tightening all of the mounting hardware.The new masts and antennas in place.Looking up from the roof at the shiny new antennas.
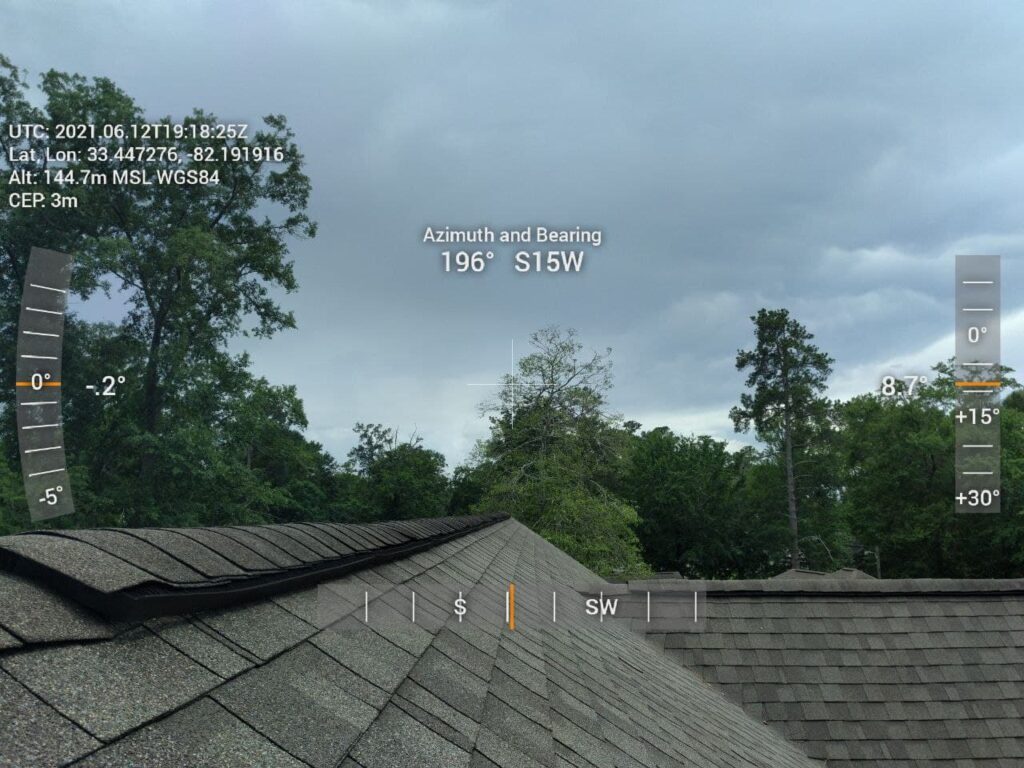
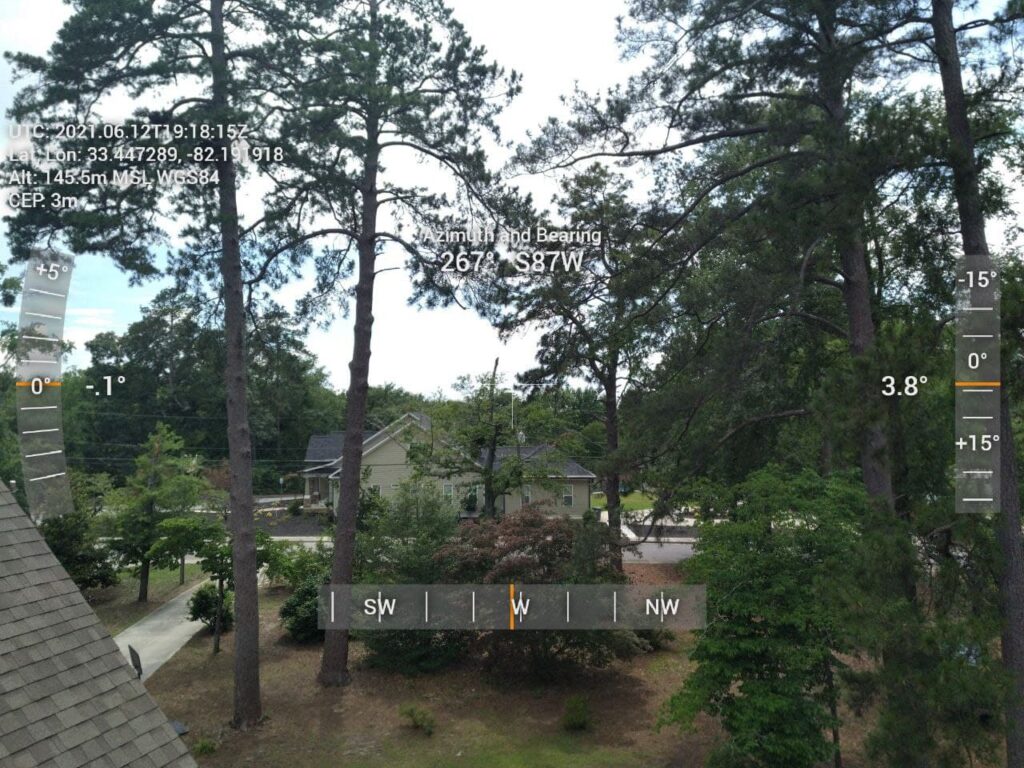
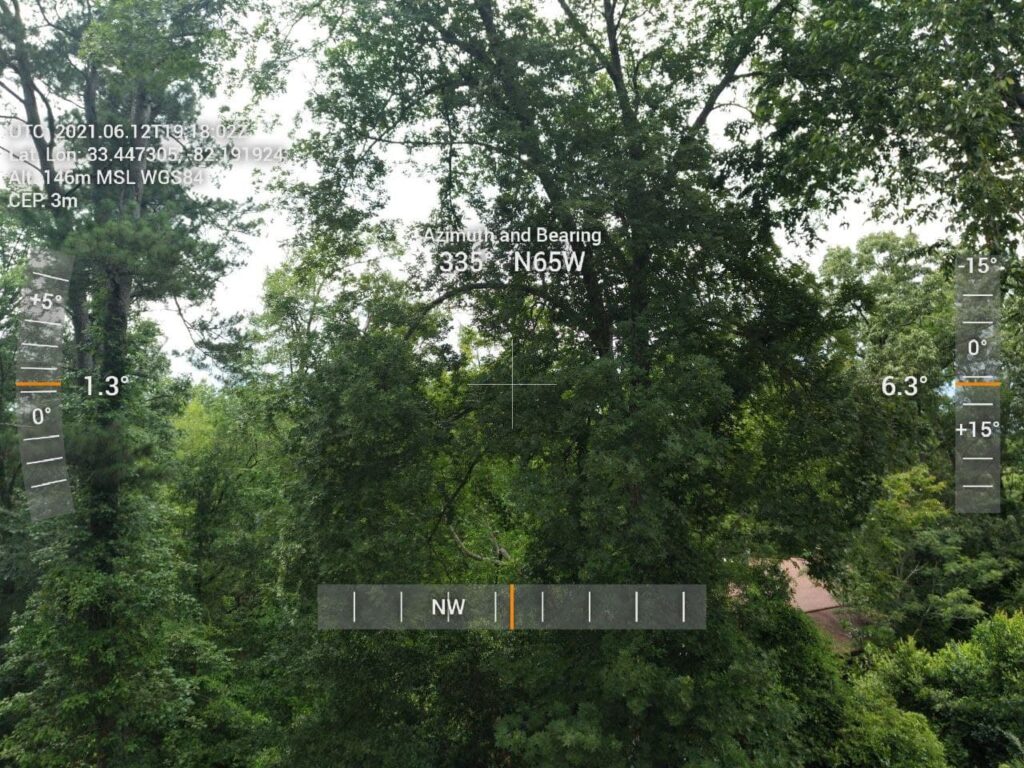
With the lift bucket extended, Eric took some photos that give an “antenna-eye” view from the rooftop.
Since we already had the lift, I took advantage of the opportunity to place a couple of ropes and pulleys for future use. The first about 40-45 feet up in a hickory tree, and the other on an old utility pole beside the driveway.
Installing a pulley and rope on a tall hickory tree in my yard.Removing some old wires and installing a rope and pulley at the top of this utility beside my driveway.
We had to take a short break for rain and thunderstorms. (The new antennas survived their first thunderstorm.) Even though there were a few adjustments made along the way, overall the project went as planned and was successful. Unfortunately, we did not have the same luck earlier in the day at Rusty’s house, because we could not get the lift into a position where the bucket would reach his antenna mast. I sure wish that had gone better.
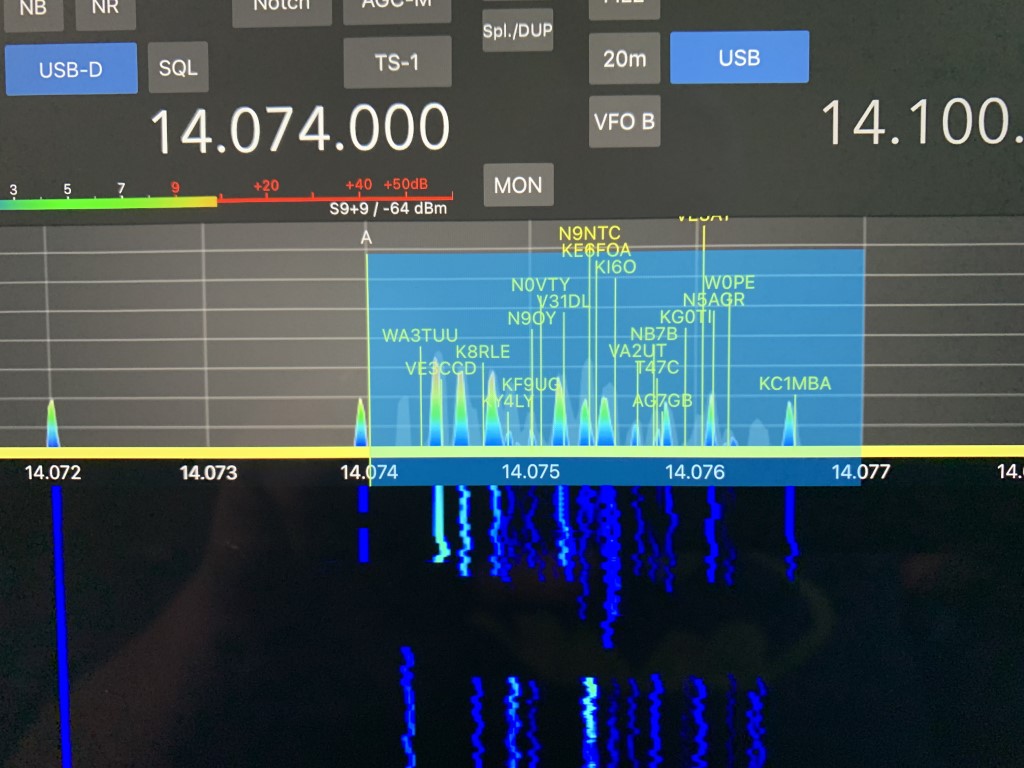
I have not yet had a chance to fully test the performance of the new antennas. The new 2M/70cm has higher gain and is mounted 10 feet higher than the previous antenna. The 6M HO Loop is very narrow-band, but the SWR is nearly perfect at 50.3 MHz, so it will be great for digital and CW work. I did tune to 50.313 MHz and could hear and decode lots of FT8 from stations participating in the ARRL June VHF Contest. I’ll make some additional posts with my observations about the performance as I operate more with these antennas.
This afternoon I finally got around to building a go-box for HF. I’ve had all of the components for a long time, but just never got around to the build. I would like to thank my friend Rusty, KG4HIR, who did most of the work on this build. This go-box is now ready to operate, but I hesitate to say it has been completed because there is still some empty space in the box to work with!
Here is a list of the primary materials used for this go-box:
Icom IC-7300 MFJ 4230MVP 30A Switching Power Supply with PowerPole Connectors MFJ 939I Autotuner Icom SP-35 External Speaker West Mountain Radio Epic PWRgate West Mountain Radio RIGrunner 4004 USB Mounting Brackets for IC-7300 and Power Supply Heavy Duty Hook and Loop Fastener Roll Gator Case Molded 4U Rack Case Two 1U Rack Mount Shelves 2U Rack Mount Panel Spacer with Venting NEMA 5-15R Plug Adapter with Mounting Holes 3 ft. USB Cable B to B – F/M – Panel Mount USB Extension M6 Terminal Binding Post 10 AWG Red/Black Zip Cord 45A Anderson PowerPole Connectors RG-8X Coax Jumper Cables UHF F-F Bulkhead Adapter Heavy Duty Velcro Strips
This is not intended to be a step-by-step tutorial for the build, but we did capture lots of images to give you an idea of how the go-box was assembled.
Rusty, KG4HIR, did the hard work on this project! Here we have the materials gathered. We had mounting brackets for the radio and power supply, but not for the MFJ autotuner. Rusty is preparing to secure it with heavy duty hook and loop fastener strips.The 4U rack mount case before installing the components.More components used for the go-box: 10 gauge zip cord, zip ties, HF4 to PowerPole adapter, RIGrunner, and Epic PWRgate.The Icom IC-7300Preparing the hook and loop fasteners to secure the MFJ autotuner. In the future, we may create some brackets to secure it better, but the hook and loop fasteners are secure and very strong.The MFJ autotuner and power supply attached to the top of the shelf. The mounting bracket for the IC-7300 is attached to the bottom side of the shelf.The IC-7300 mounting bracket was secured to the bottom of the shelf that also holds the autotuner and power supply.After looking at several configurations, we determined that mounting the PWRgate and RIGrunner upright would be more practical for adding and removing cables. They are secured to a piece of square aluminum tubing that is attached to the rack mount shelf at the back of the case.All of the primary components are secured to the shelves inside the case. For convenience, the primary connections into the go-box (AC power, ground terminal, USB cable to radio, and bulkhead connector for coax) are fitted to a vented panel spacer that is mounted at the top on the back of the case.Beginning the process of making DC power and RF connections inside the go-box.All of the connectors are attached to the vented panel spacer, and it is ready to be secured.Completing all connections for power, tuner, USB, and coax.The back of the (nearly) finished go-box. There is still some available space in the back and front of the case. Some of it will be left for airflow and ventilation, but we are considering whether some additional components could be added.The front of the (nearly) finished go-box. You can see the external speaker and the open space at the center top and right side bottom shelf. We may put a meter in the top space, and create a storage compartment at the bottom.
I was told that a go-box is never really finished, and that there will be changes and additions. The Epic PWRgate in this go-box makes it very versatile. It can be powered by AC via the power supply, as well as by a battery and/or a solar panel.
This build took a little over four hours. Much of that time was spent measuring, aligning, drilling and cutting to attach the components to the shelves and spacer. I still need to add some ferrite beads on several wires and cables. The next step after that is a field test to ensure everything is working properly. (That will be a topic for another post.) Once the testing is complete and it is confirmed to be fully operational, I will use the go-box at club operating events and for casual operating from the tailgate or patio.
The first balloon, which carried a payload with a SPOT Trace GPS tracker and a GoPro camera, was designed climb to an altitude of 70,000 – 100, 000 feet before bursting and falling back to earth. A parachute was attached to the payload so it could return to ground intact for retrieval by a chase crew. We expected the payload to land approximately 50 miles east of the launch site, but the balloon traveled much farther than anticipated. The chase teams scrambled and the payload was successfully retrieved approximately 150 miles from the launch site. The camera captured some amazing images while the balloon was in the stratosphere. Some of the best pictures are featured in the linked news stories.
Photo captured from the high altitude weather balloon shortly after launch. This camera captured lots of amazing images during this balloon flight.One of the many spectacular views captures by the camera on the high-altitude weather balloon.
This post focuses primarily on the second “pico” balloon, which carried only a LightAPRS-WAPRS and WSPR tracker as the payload, and was designed to reach an altitude of approximately 50,000 – 60,000 feet and achieve neutral buoyancy to travel for a much longer period of time. The LightAPRS-W, which is very small, was powered by two small PowerFilm 4.8V solar panels with two 5F 3V supercapacitors. With this power source, the tracker transmits APRS on VHF at .5 to 1 Watt, and WSPR on HF at 10 mW (1/100th of a Watt!).
We spent several days configuring and testing the tracker, using the configuration and programming instructions provided by QRP Labs on GitHub, and following some helpful suggestions in the Tips & Tricks for Pico Balloons wiki. The tracker also had two light wire antennas for APRS (19.4 inches) and 20 meter WSPR (16.6 feet), and a counterpoise (16.6 feet) attached.
Assembled LightAPRS-W tracker with two PowerFilm solar panels and super capacitors. It’s really small and light!
Once assembled, the tracker was easy to configure with an Arduino IDE to load the APRS callsign (K4KNS-11), WSPR callsign (K4KNS), and a few other settings. It’s best to pay very close attention to the instructions and comments in the configuration file! After the loading the configuration, we placed the tracker in the sun to test and listen for APRS and WSPR signals. We were able to confirm that the tracker was transmitting good APRS and WSPR signals. Due to the very low power of the VHF and HF transmitters, we could only confirm local reception. With the tracker stationary and in full sunlight, we noted that the LightAPRS-W transmitted an APRS packet approximately every 5 minutes, and a WSPR signal every 4-6 minutes.
Assembled and configured LightAPRS-W in the sun to test the solar panels and monitor APRS and WSPR signals.APRS received from the LightAPRS-W during testing.Good test of WSPR signal from K4KNS!
It’s one thing to have a good test under controlled conditions, but quite another to achieve success under field conditions. On the day of the launch, the weather was marginal, but within acceptable parameters for a launch. We double checked to ensure the tracker was powered up and transmitting, and tied it to the balloon.
Good test of the APRS signal on launch day!
We had a good launch. The balloon, with the tracker hanging 16.6 feet below the balloon (to accommodate the counterpoise) and trailing a 16.6 foot HF antenna, quickly rose to an altitude above any potential obstructions and began its journey. Within moments, we saw the first APRS positions appear on aprs.fi. A few moments later, using the WSPR Watch iPad app, we saw that the WSPR signal was being received across the U.S.!
The first APRS track for balloon K4KNS-11!The 10 mW WSPR signal was received as far west as Oregon!
It was all going so well! We continued to watch the balloon tracking eastward and climbing, following the same track as the high-altitude balloon that had been launched about a half hour earlier. Then, after about an hour of flight, both the APRS and WSPR signal went off the air. At that time the balloon was 55 miles east of the launch site at an altitude of 37,500 feet.
The track and final position received from K4KNS-11.Location, speed, course, speed, altitude, temperature, pressure and solar cell voltage data from K4KNS-11 exported from aprs.fi.
We’re not sure exactly why the signals were lost, but we do not believe the balloon went down in that location. We are speculating that the tracker may have been damaged due to the high wind speeds on lost power. It is unknown how much farther the balloon might have traveled. Despite the relatively short flight, we did collect some good data for the students at Savannah River Academy to evaluate. We also proved to ourselves that we could successfully launch a balloon and track it with APRS, and that a very weak WSPR signal transmitted from high altitude could be received by stations thousands of miles away!
Map on WSPRnet.org showing stations that received the K4KNS WSPR signal on May 5, 2021.Spot Database for K4KNS on on May 5, 2021 from WSPRnet.org.
Using aprs.fi’s data export tool, we were able to export a KMZ file with the balloon’s tracking data, and use Google Earth to view the full track and altitude changes.
Google Earth map of the track and altitude changes for pico balloon K4KNS-11 on May 5, 2021.
This was an amazing experience! We captured many lessons learned, and we intend to build another more hardened version of the tracker so we can launch another balloon and hopefully track it over a much longer distance and time.