I decided to build a small 50W VHF/UHF station to use for portable operations, such as supporting events or setting up in a temporary location, with a choice of using AC power or a battery. I don’t need anything fancy like DMR or D-Star, but I might want to to use it for APRS or WinLink.
After a bit of research and pricing options, I went with something that turned out to be a very easy build. I chose a Yaesu FTM-6000R as the transceiver. It has basic features, but has gotten some good reviews. It is also known to be a good transceiver for data, and is 9600 bps capable.
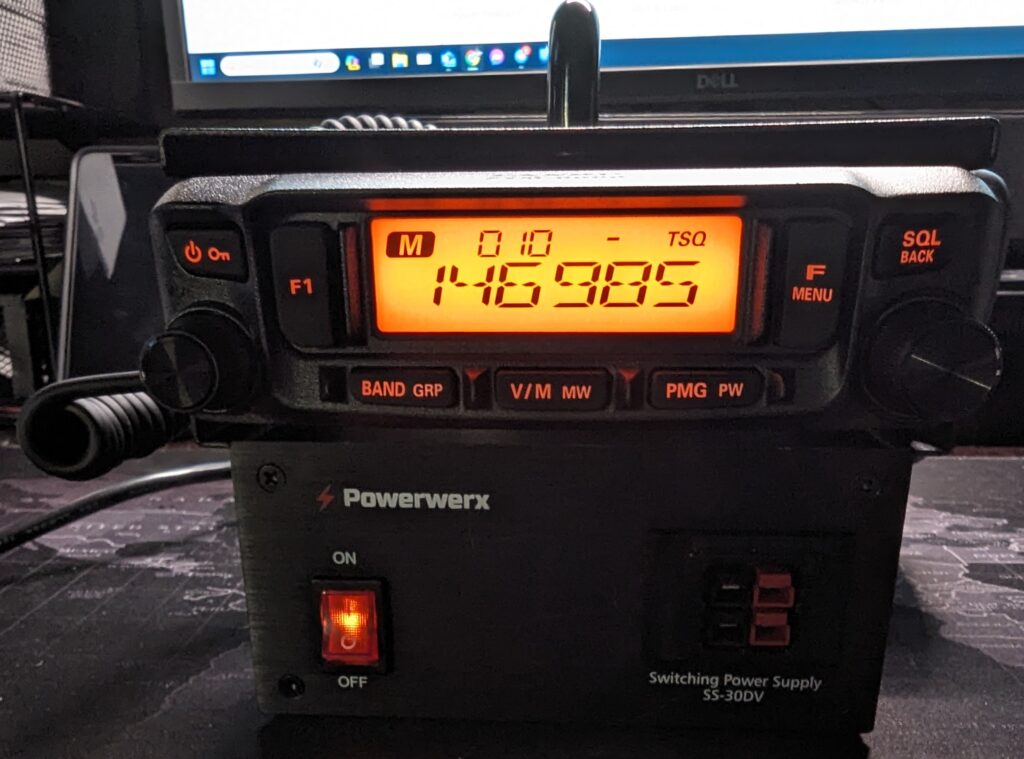
I also chose a 30 amp switching power supply and a mobile base station enclosure from PowerWerx, to make it a single unit that’s easy to carry around. The enclosure includes a short DC cable to connect the radio to the power supply. If I want to use a battery instead of the power supply, I just disconnect the T-connector from the power supply, and connect it to the battery. It was very easy to assemble the whole system.
I tested with the power supply and with a battery, and it works great. The whole unit is very compact and stable.
My next step will be to configure it for WinLink and APRS. I have a Mobilinkd TNC-4, and I ordered a DigiRig. The FTM-6000R has a 10 pin MiniDin connector, and DigiRig sells 1200 bps and 9600 bps cables for the radio. DigiRig also sells an adapter cable to use DigiRig cables with a Mobilinkd, and vice versa.
I’ll make another post after testing the setup with WinLink and APRS.
It has been a year since I posted a new item! Time to get back to it! My last post was about a project for my IC-705 using an M5Stack microcontroller. I became interested in learning about other ham radio related projects using microcontrollers.
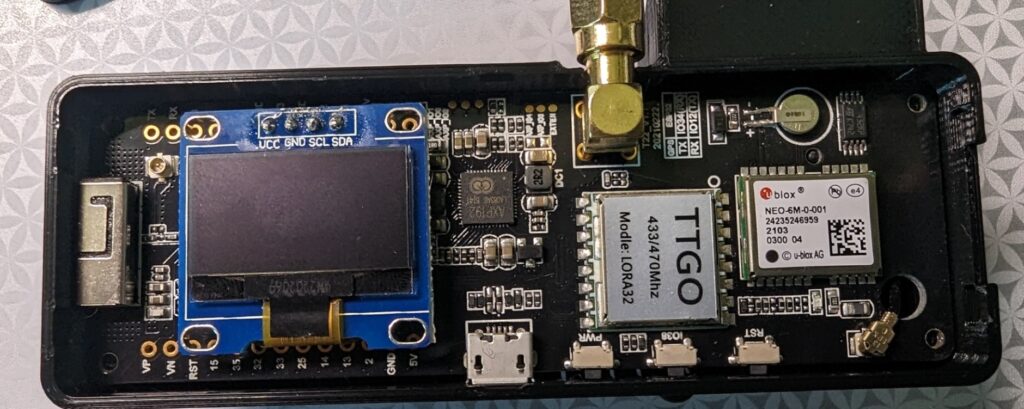
Searching online, I found two related projects to build an APRS iGate and a tracker. Both of these projects use inexpensive LoRa32 microcontroller boards. I chose TTGO T-Beam v1.1 boards that operate on 433 MHz. Make sure you buy the 433 MHz version of the board for the APRS projects. The board includes a small OLED screen, and has onboard WiFi, GPS and SMA connector for the antenna. You will probably have to solder the OLED screen to the board, but there are only four pins to solder.
On the back of the board, there is a battery holder for an 18650 3.7 V lithium ion battery to power the board. The board can also be powered through the microUSB port, which also recharges the battery. There are other similar LoRa32 boards that you can use for these projects, and they are readily available on Amazon, eBay, and other online retailers.
Front and back of TTGO T-Beam v1.1 ESP32 433MHz LoRa32 board
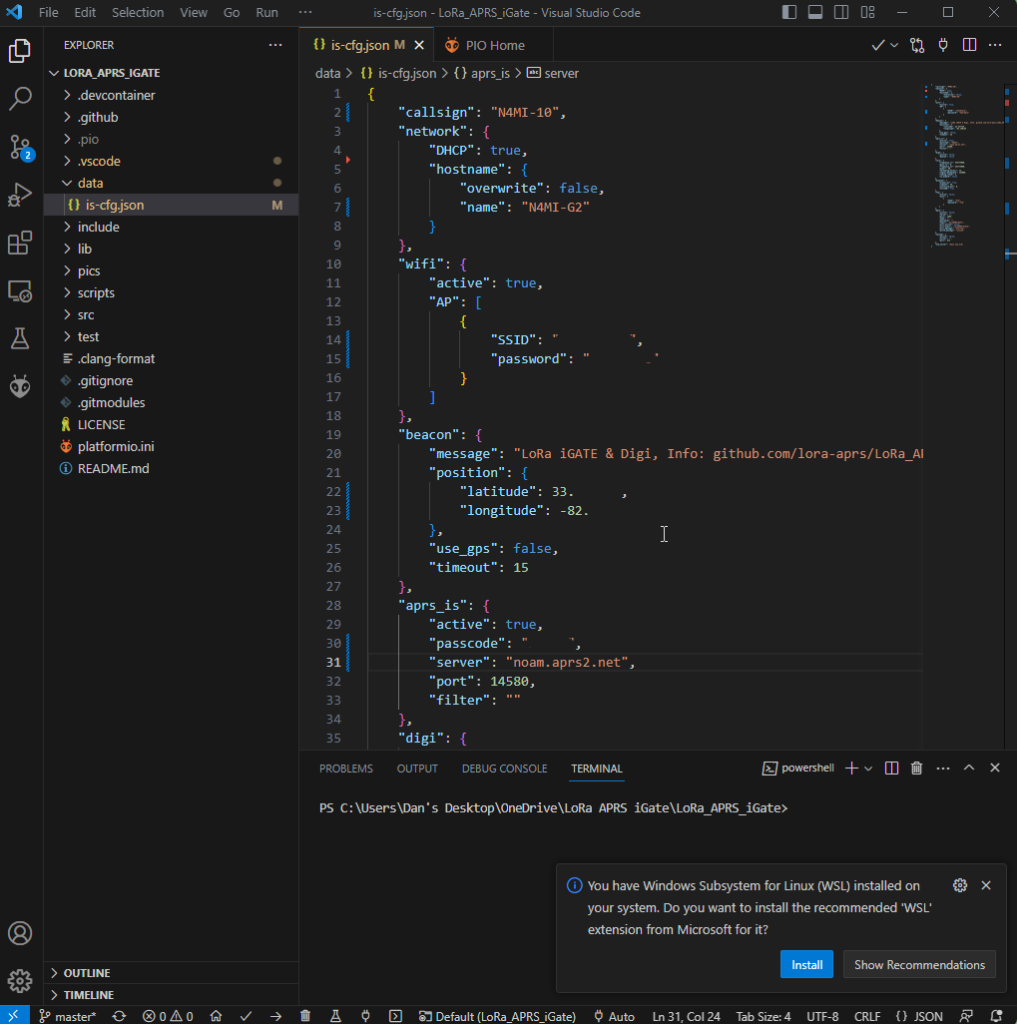
Programming the board is fairly easy. The iGate and tracker project pages on GitHub include links to quick start guides. The quick start guides are in German and French, but you can right-click in Chrome and choose “Translate to English”. Even better, there is an excellent video by Tech Minds on YouTube that will take you step-by-step through the process of configuring and programming the iGate and tracker modules using Visual Studio Code with the PlatformIO plugin. This process will load the firmware onto the module, as well as a json configuration file that includes your callsign, wifi info (for the iGate), etc. I highly recommend viewing the Tech Minds video before you start these projects!
Lora APRS iGate json configuration file in Visual Studio Code
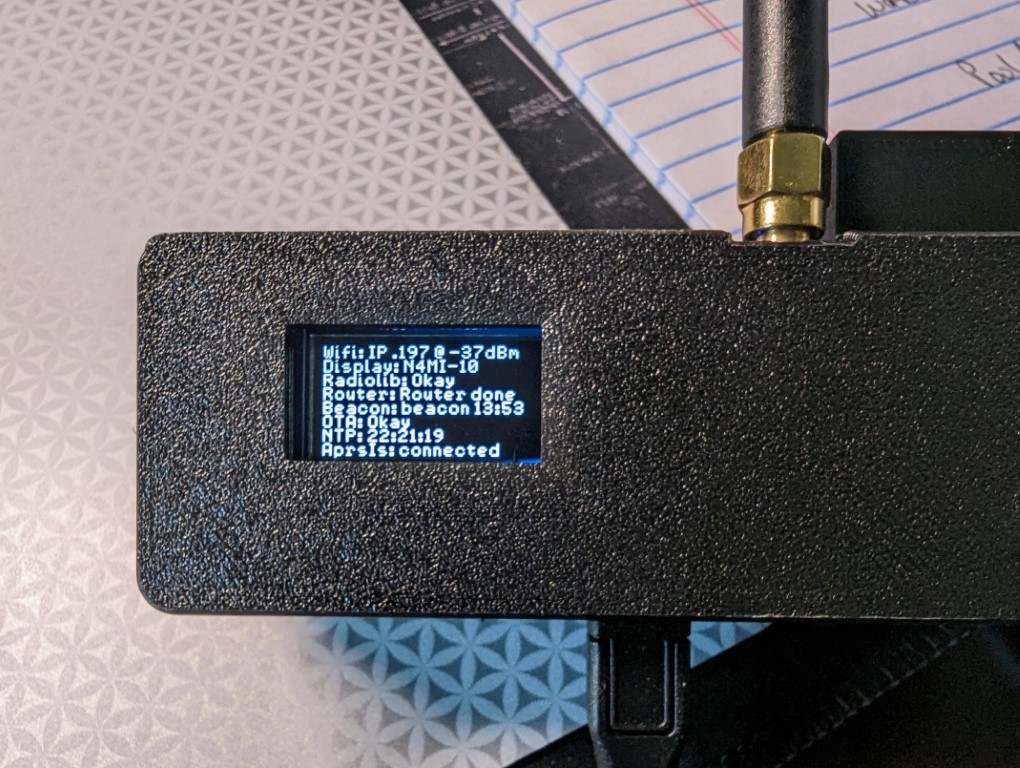
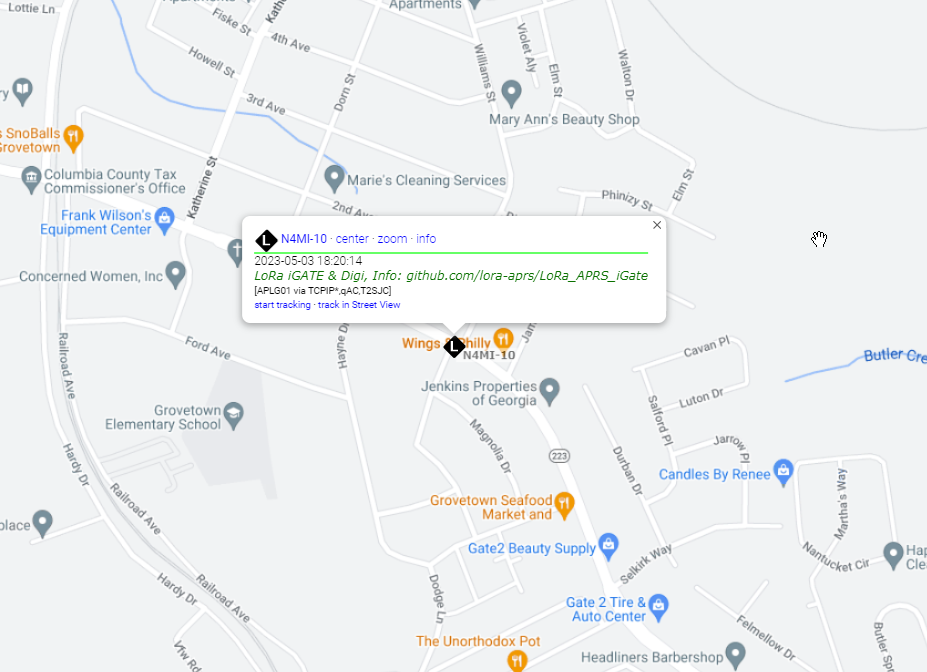
After programming the iGate and tracker, I was ready to test! I missed a step in my initial configuration of the iGate, so it did not connect to my home wifi on the first attempt. Once that was fixed, it connected to the internate and I was able to see the LoRa iGate symbol for my ssid N4MI-10 appear on the aprs.fi live APRS map. The iGate is operating on 433.775 MHz.
OLED screen showing LoRa APRS iGate configurationN4MI-10 LoRa APRS iGate, operating on 433.775 MHz, displayed on aprs.fi
Once the iGate was operational, it was time to test the tracker. I chose N4MI-1 as the ssid for testing the tracker. I have some other APRS capable radios, so I will have to come up with a plan for assigning a ssid for each of them. The tracker powered up and initialized. Once it acquired enough satellites for a fix, I saw it transmit the first beacon, which was immediately picked up by the iGate. Awesome!
You can configure the tracker for smart beaconing in the json configuration file. You can also manually transmit a beacon using the middle button on the LoRa module.
OLED screen on LoRa 433 MHz APRS tracker
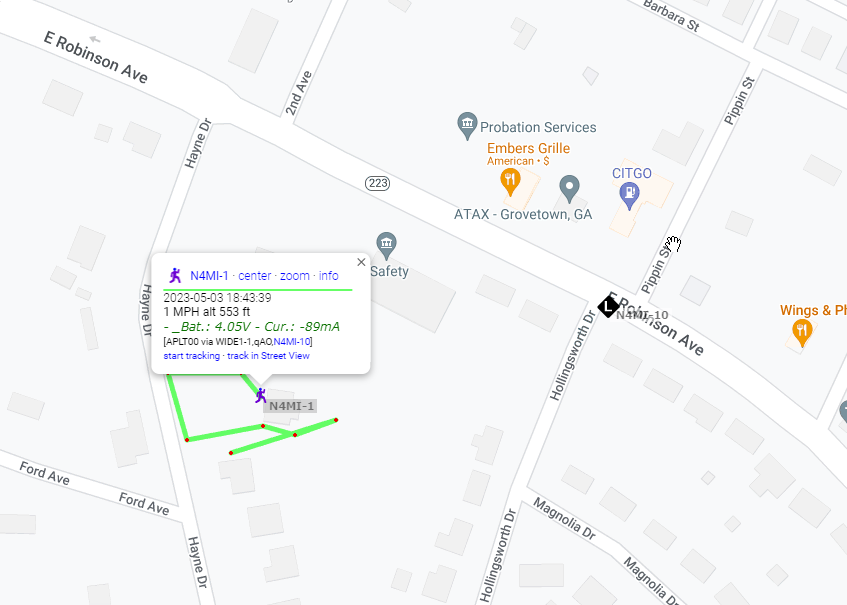
I took the tracker out for a short walk, and transmitted a beacon from several locations, all of which were received by the iGate and displayed on aprs.fi.
Positions from N4MI-1 LoRa 433 MHz APRS tracker displayed on aprs.fi
The transmitter in the LoRa board is very low power, about 200 mW, so the range with the small SMA antenna is limited. The range can be extended by using a better antenna at a higher elevation. Additionally, a small RF amplifier could be used to increase the power.
This was a very fun and relatively easy project. I am planning to attach a 70cm antenna at a higher elevation to the iGate in case other hams in this area would like to build and use LoRa 433 MHz APRS trackers.
I wanted to incorporate some of my most recent ham radio activities into a new QSL card. I reached out to my friend Jeff, K1NSS, and gave him a basic idea about what I wanted. I wanted my DX hound buddy Luke the Catahoula featured in the card. As usual, he worked his magic and came up with a fantastic design that captured my vision, and then some! What do you think? This version will be going to the printer soon.
My faithful old 2011 Tundra pickup truck, as great as it was, was starting to require frequent repairs. I got a great trade-in offer for it, so I got a new Dodge 1500 Crew Cab. A new truck means time to install a new radio! My good friends Rusty KG4HIR, Randall KN4FYG, and Steven KN4RVU offered their expertise, time and sweat to help me install the radio. They’ve all had experience with mobile radio installation, but this was my first time.
In my Tundra, I had an Icom ID-5100A, and I had a Kenwood TM-D170GA in my shack. It seemed like a no-brainer to mount the Kenwood radio in the new truck to take advantage of the APRS capabilities, which are not really needed in the shack. So, the ID-5100A from my old truck was moved into the shack, and the TM-D710GA was designated for the new truck.
New Ram 1500 pickup with dual band antenna installed on a fender mount.
Rusty gave me some good advice, which is to get used to the layout of the new truck before deciding how and where to mount the radio. I did not want to drill too many holes in the new truck, so I decided to go with a fender mount for the antenna. I got an antenna mount, specifically designed for the Ram 1500, from Valley Enterprises. The main unit of the radio is mounted with a bracket under a back seat. After some research, I chose a center dash mount from ProClips, and an extension plate with magnetic puck from Lido Radio for the head unit. The dash mount is very sturdy and well designed. The magnetic puck on the extension plate is very convenient for the microphone.
The install went very well. It was a hot and humid morning, but the awesome install crew got the job done in about 3 hours. All of the truck parts went back in place, with no extra or missing pieces, and the radio powered right up. The way everything is mounted makes it very easy to install a new radio, if that’s ever necessary.
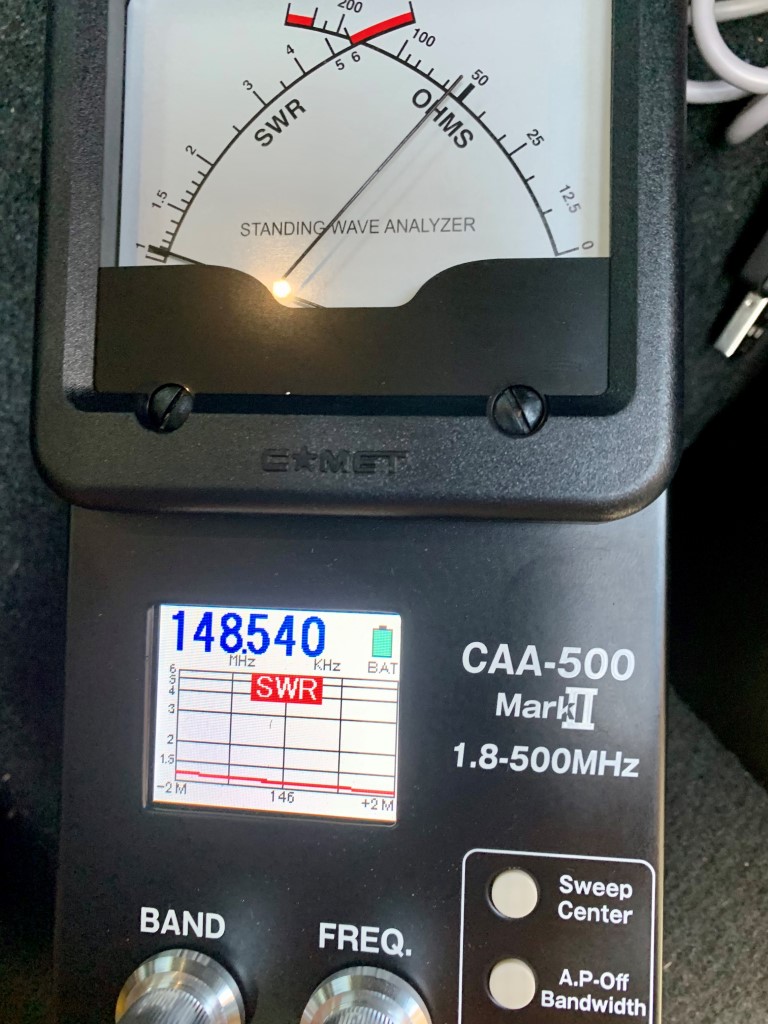
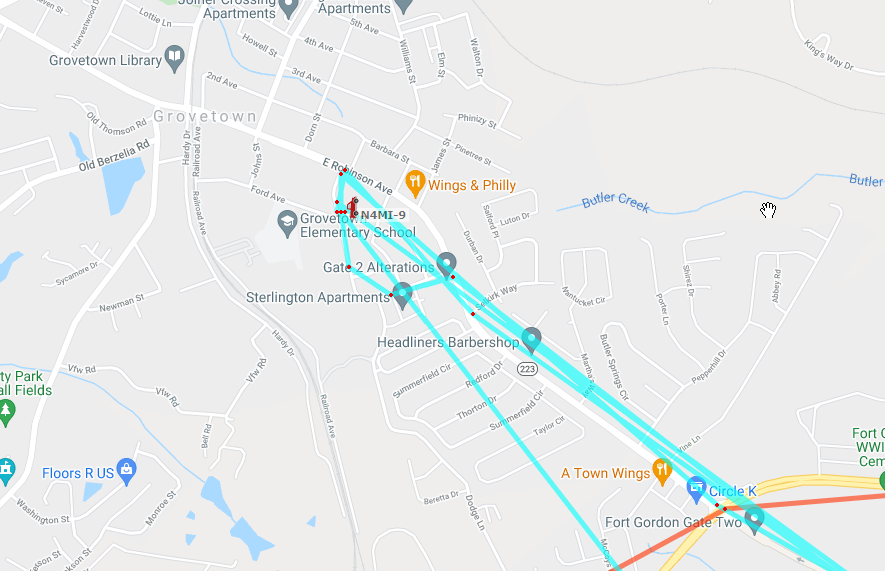
The radio had previously been programmed for use in the shack, but we were able to verify that it was transmitting and receiving. Later, I reprogrammed the radio and adjusted all of the settings for mobile use. I also did some test drives to see how the radio performed with the local repeaters, and simplex with a few friends. It seems to perform as good as I would expect with a fender-mounted antenna. I also have it transmitting APRS beacons as N4MI-9.
I am very pleased with the radio and how it is installed! It’s great to be on the air again while I’m rolling.
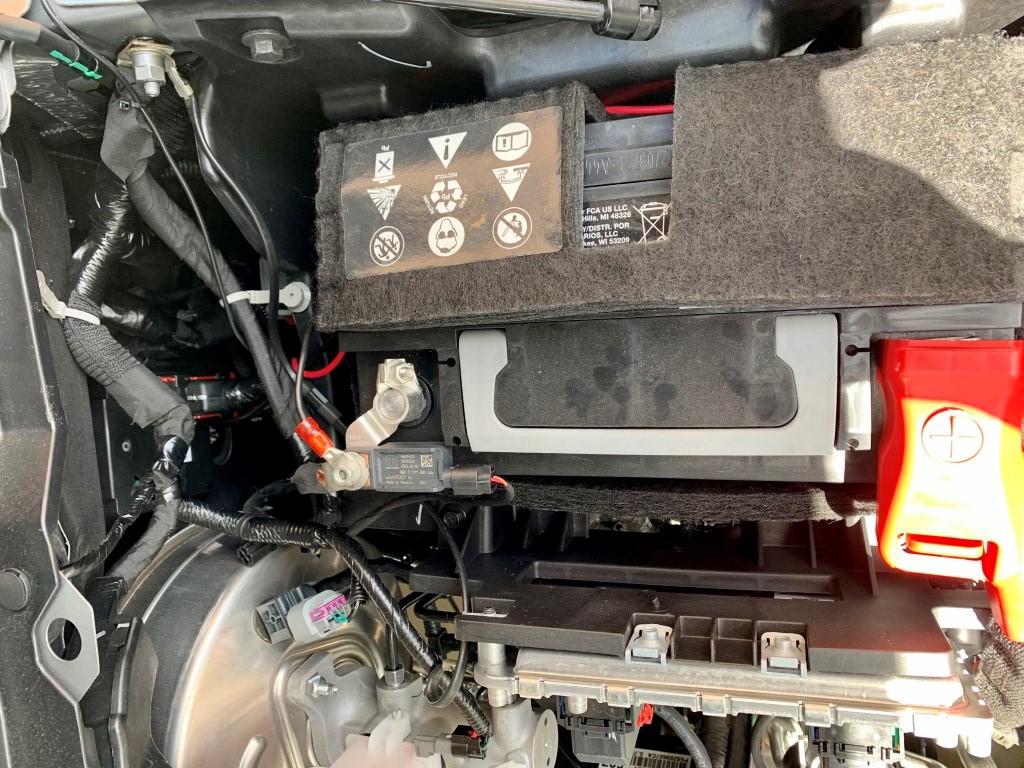
The power and antenna cables came through the firewall with some gentle persuasion, through an existing hole where other wires were routed from the cabin to the engine compartment.Did you know that the center entertainment console just pops out of place with a good tug? It’s held in place with two clips. It’s an uneasy feeling when pulling it loose! The cable from the radio to the remote head unit is routed behind the entertainment console.The main radio unit is mounted under a back seat. It’s mounted with the rear of the unit facing toward the cabin to improve airflow and allow easier access to the plugs and cables. I leave a programming cable plugged in.The drivers side fender mount came from Valley Enterprises. I am using a Comet CA-2X4SR dual band antenna, which is compact and very broad band across 2M and 70cm.Final installation of the head unit. The cable comes in behind the entertainment console. I used a ProClips mount center dash mount designed specifically for a Ram 1500, along with a Lido extension plate for the head unit and a magnetic puck for the microphone.The CA-2X4SR is either a great dummy load, or a well tuned antenna! You can follow my tracks on aprs.fi as N4MI-9
The first balloon, which carried a payload with a SPOT Trace GPS tracker and a GoPro camera, was designed climb to an altitude of 70,000 – 100, 000 feet before bursting and falling back to earth. A parachute was attached to the payload so it could return to ground intact for retrieval by a chase crew. We expected the payload to land approximately 50 miles east of the launch site, but the balloon traveled much farther than anticipated. The chase teams scrambled and the payload was successfully retrieved approximately 150 miles from the launch site. The camera captured some amazing images while the balloon was in the stratosphere. Some of the best pictures are featured in the linked news stories.
Photo captured from the high altitude weather balloon shortly after launch. This camera captured lots of amazing images during this balloon flight.One of the many spectacular views captures by the camera on the high-altitude weather balloon.
This post focuses primarily on the second “pico” balloon, which carried only a LightAPRS-WAPRS and WSPR tracker as the payload, and was designed to reach an altitude of approximately 50,000 – 60,000 feet and achieve neutral buoyancy to travel for a much longer period of time. The LightAPRS-W, which is very small, was powered by two small PowerFilm 4.8V solar panels with two 5F 3V supercapacitors. With this power source, the tracker transmits APRS on VHF at .5 to 1 Watt, and WSPR on HF at 10 mW (1/100th of a Watt!).
We spent several days configuring and testing the tracker, using the configuration and programming instructions provided by QRP Labs on GitHub, and following some helpful suggestions in the Tips & Tricks for Pico Balloons wiki. The tracker also had two light wire antennas for APRS (19.4 inches) and 20 meter WSPR (16.6 feet), and a counterpoise (16.6 feet) attached.
Assembled LightAPRS-W tracker with two PowerFilm solar panels and super capacitors. It’s really small and light!
Once assembled, the tracker was easy to configure with an Arduino IDE to load the APRS callsign (K4KNS-11), WSPR callsign (K4KNS), and a few other settings. It’s best to pay very close attention to the instructions and comments in the configuration file! After the loading the configuration, we placed the tracker in the sun to test and listen for APRS and WSPR signals. We were able to confirm that the tracker was transmitting good APRS and WSPR signals. Due to the very low power of the VHF and HF transmitters, we could only confirm local reception. With the tracker stationary and in full sunlight, we noted that the LightAPRS-W transmitted an APRS packet approximately every 5 minutes, and a WSPR signal every 4-6 minutes.
Assembled and configured LightAPRS-W in the sun to test the solar panels and monitor APRS and WSPR signals.APRS received from the LightAPRS-W during testing.Good test of WSPR signal from K4KNS!
It’s one thing to have a good test under controlled conditions, but quite another to achieve success under field conditions. On the day of the launch, the weather was marginal, but within acceptable parameters for a launch. We double checked to ensure the tracker was powered up and transmitting, and tied it to the balloon.
Good test of the APRS signal on launch day!
We had a good launch. The balloon, with the tracker hanging 16.6 feet below the balloon (to accommodate the counterpoise) and trailing a 16.6 foot HF antenna, quickly rose to an altitude above any potential obstructions and began its journey. Within moments, we saw the first APRS positions appear on aprs.fi. A few moments later, using the WSPR Watch iPad app, we saw that the WSPR signal was being received across the U.S.!
The first APRS track for balloon K4KNS-11!The 10 mW WSPR signal was received as far west as Oregon!
It was all going so well! We continued to watch the balloon tracking eastward and climbing, following the same track as the high-altitude balloon that had been launched about a half hour earlier. Then, after about an hour of flight, both the APRS and WSPR signal went off the air. At that time the balloon was 55 miles east of the launch site at an altitude of 37,500 feet.
The track and final position received from K4KNS-11.Location, speed, course, speed, altitude, temperature, pressure and solar cell voltage data from K4KNS-11 exported from aprs.fi.
We’re not sure exactly why the signals were lost, but we do not believe the balloon went down in that location. We are speculating that the tracker may have been damaged due to the high wind speeds on lost power. It is unknown how much farther the balloon might have traveled. Despite the relatively short flight, we did collect some good data for the students at Savannah River Academy to evaluate. We also proved to ourselves that we could successfully launch a balloon and track it with APRS, and that a very weak WSPR signal transmitted from high altitude could be received by stations thousands of miles away!
Map on WSPRnet.org showing stations that received the K4KNS WSPR signal on May 5, 2021.Spot Database for K4KNS on on May 5, 2021 from WSPRnet.org.
Using aprs.fi’s data export tool, we were able to export a KMZ file with the balloon’s tracking data, and use Google Earth to view the full track and altitude changes.
Google Earth map of the track and altitude changes for pico balloon K4KNS-11 on May 5, 2021.
This was an amazing experience! We captured many lessons learned, and we intend to build another more hardened version of the tracker so we can launch another balloon and hopefully track it over a much longer distance and time.